




服務(wù)熱線
0769-28680919
153-2293-3971

為了能使使用者在挑選一款機(jī)器視覺(jué)系統(tǒng)時(shí)應(yīng)當(dāng)考量的關(guān)鍵性的、基礎(chǔ)的基本特征層面給予指導(dǎo)。
下邊是挑選一款機(jī)器視覺(jué)系統(tǒng)時(shí)要首先考量的十個(gè)層面:
1、定位器
目標(biāo)或基本特征的精準(zhǔn)定位是一個(gè)檢測(cè)設(shè)備或由視覺(jué)效果引導(dǎo)的運(yùn)動(dòng)系統(tǒng)的主要功能。過(guò)去的物品定位利用的是灰度值校正來(lái)識(shí)別物品。雖然這類(lèi)技術(shù)性取得了普遍的運(yùn)用,可是,它在圖像品質(zhì)下降的情況下,就缺少穩(wěn)定性。圖像品質(zhì)下降可能是因?yàn)榱鑱y、亮度不同和遮住等要素的干擾。相對(duì),幾何目標(biāo)定位法是一種全新的方式 ,它采用目標(biāo)的輪廓線來(lái)識(shí)別目標(biāo)及其基本特征
2、光與照明
眾所周知,適度的燈光效果和照明對(duì)視覺(jué)效果運(yùn)用的成功率尤為重要。有時(shí)候,雖然挑選了適宜的燈光效果和照明,可是,假如被檢測(cè)的目標(biāo)或基本特征略微變動(dòng)一下,就需要相對(duì)應(yīng)更改燈光效果和照明亮度。例如,芯片的拋光表面的不同,在ocr識(shí)別運(yùn)用中激光器蝕刻的標(biāo)識(shí)的品質(zhì)的不同。
3、完整的工具集對(duì)多個(gè)工具
機(jī)器視覺(jué)軟件主要以?xún)煞N典型的形式出售——一種是完整的視覺(jué)效果工具集,另一種是用于特定任務(wù)的工具的運(yùn)用,如BGA檢測(cè)。最終用戶的運(yùn)用將決定是采用一套完整的視覺(jué)效果工具集還是采用眾多的特定的工具。視覺(jué)工具是一般的運(yùn)用或算法,它能對(duì)圖像或圖像某個(gè)部分完成預(yù)定的任務(wù)。例如,一個(gè)斑點(diǎn)檢測(cè)工具可以找出一組暗的或亮的象素,并測(cè)量出這個(gè)斑點(diǎn)的各種尺寸。挑選一款視覺(jué)系統(tǒng)的核心就在于擁有一套完整的視覺(jué)效果工具集。雖然你在作項(xiàng)目之初不需要所有的工具,可是,幾年之后你的需要就會(huì)更改,對(duì)新的應(yīng)用就可能需要另外的工具。
4、編程和操作方便簡(jiǎn)潔、直觀的圖形界面是容易采用和設(shè)置的關(guān)鍵性。
當(dāng)今機(jī)器視覺(jué)產(chǎn)品之間的主要區(qū)別就在于他們的圖形接口。接口應(yīng)當(dāng)從“設(shè)置”和“操作”這兩層面來(lái)評(píng)價(jià)。對(duì)一個(gè)工程師而言,它應(yīng)當(dāng)十分復(fù)雜,而對(duì)一個(gè)使用者而言應(yīng)非常簡(jiǎn)單。例如,一個(gè)視覺(jué)系統(tǒng)的校正應(yīng)當(dāng)簡(jiǎn)潔明了得只單擊幾次鼠標(biāo),而不是象在火箭科學(xué)中的練習(xí)。
5、亞象素精度
視覺(jué)系統(tǒng)的分辨率是系統(tǒng)能分辨的最小基本特征。例如,’1’的視覺(jué)效果范圍(FOV)采用一個(gè)640x480象素的計(jì)算機(jī)圖像將取得1/640的分辨率或’0.00156’。實(shí)際上,機(jī)器視覺(jué)算法具有亞象素的能力。也就是說(shuō),這些算法能夠測(cè)量或得出比一個(gè)象素更小的單位。視覺(jué)效果工具的亞象素精度取決于圖像的品質(zhì)和算法的強(qiáng)大。
6、將來(lái)的升級(jí)
機(jī)器視覺(jué)系統(tǒng)可使用在各種各樣場(chǎng)合,他們的使用范圍可從時(shí)髦的攝像機(jī)到監(jiān)視系統(tǒng)。當(dāng)選取一個(gè)系統(tǒng)時(shí)需要充分考慮系統(tǒng)未來(lái)的升級(jí)。幾類(lèi)廠商提供的常用視覺(jué)軟件能為終端用戶配置適宜的照明、光學(xué)系統(tǒng)和視覺(jué)工具。專(zhuān)用軟件包如BGA檢測(cè)、OCR等也可當(dāng)作預(yù)先配置好的軟件出售。依據(jù)常用目標(biāo)的視覺(jué)軟件系統(tǒng)更快升級(jí)。終端用戶應(yīng)該依據(jù)額外的攝像機(jī)、照明的改變、視覺(jué)工具的改變等來(lái)充分考慮未來(lái)對(duì)系統(tǒng)的需要。例如,若一個(gè)要多攝像頭的系統(tǒng),就需要對(duì)一個(gè)依據(jù)幀幅獲取器的系統(tǒng)與一個(gè)依據(jù)時(shí)髦?jǐn)z像機(jī)的系統(tǒng)的價(jià)格和靈活性實(shí)現(xiàn)比較。
7、圖像預(yù)處理
檢測(cè)特征點(diǎn)和缺陷是特別的至關(guān)重要,不管亮度和對(duì)象外表或材質(zhì)不同。圖像預(yù)處理優(yōu)化算法能夠?qū)D像的特征點(diǎn)放大,以使視覺(jué)工具能更快的檢測(cè)它們。同樣,特征點(diǎn)也能夠被縮小,以至視覺(jué)工具可忽視它們。濾波實(shí)際操作可用于輸入圖像的卷積。可獲得如此大量的預(yù)處理優(yōu)化算法是錯(cuò)綜復(fù)雜的視覺(jué)使用成功的關(guān)鍵。
8、視覺(jué)引導(dǎo)的運(yùn)動(dòng)
假如你的使用需要一個(gè)視覺(jué)系統(tǒng),那樣必須知道視覺(jué)系統(tǒng)與運(yùn)動(dòng)系統(tǒng)是如何集成化的。對(duì)于校正和實(shí)際操作,沒(méi)集成化的運(yùn)動(dòng)系統(tǒng)與視覺(jué)系統(tǒng)是初步的系統(tǒng),機(jī)械人或機(jī)構(gòu)和視覺(jué)系統(tǒng)是分開(kāi)校正的。在實(shí)際操作中,視覺(jué)系統(tǒng)依據(jù)在視覺(jué)坐標(biāo)系統(tǒng)中的給定具體位置測(cè)算出產(chǎn)品具體位置的偏移量,然后發(fā)命令給機(jī)器人的手臂在離初始化編程的拾取具體位置的偏移量處拾取產(chǎn)品。產(chǎn)品定位然后可定義與在機(jī)器編程的相同的六自由度坐標(biāo)空間。
9、系統(tǒng)集成
假如你對(duì)機(jī)器視覺(jué)技術(shù)并不是很熟練,那樣你對(duì)于你的項(xiàng)目就要一個(gè)系統(tǒng)集成商。理想的視覺(jué)產(chǎn)品能被系統(tǒng)集成商大量認(rèn)可。
10、工廠層連接
現(xiàn)階段,有各種各樣與視覺(jué)系統(tǒng)通訊的方式 ,常用的接口象串口(RS-232)、RS-485、并口、Ethernet、Devicenet、數(shù)字I/O等。更新的接口如IEEE-1394和USB也獲得了大量的使用。當(dāng)評(píng)估視覺(jué)系統(tǒng)時(shí),要充分考慮工廠層的可連接性。常見(jiàn)地,機(jī)器視覺(jué)系統(tǒng)是一個(gè)與其它工廠層設(shè)備和工廠的信息系統(tǒng)接口的數(shù)據(jù)獲取系統(tǒng)。一些廠商的軟件能在局域網(wǎng)或因特網(wǎng)上對(duì)視覺(jué)系統(tǒng)實(shí)現(xiàn)遠(yuǎn)程操作。在特殊領(lǐng)域,如藥物,機(jī)器視覺(jué)系統(tǒng)對(duì)特殊的使用被要求是獨(dú)立的,從而保證 設(shè)定不會(huì)受到遠(yuǎn)程操作的影響。當(dāng)選取一款視覺(jué)系統(tǒng)時(shí),視覺(jué)系統(tǒng)的通訊接口是一個(gè)至關(guān)重要的充分考慮,不應(yīng)該忽視。
 康耐德智能形狀檢測(cè)機(jī)器視覺(jué)aoi系統(tǒng)
2025-05-11
康耐德智能形狀檢測(cè)機(jī)器視覺(jué)aoi系統(tǒng)
2025-05-11
康耐德智能形狀檢測(cè)機(jī)器視覺(jué)AOI系統(tǒng)是一種基于機(jī)器視覺(jué)技術(shù)的自動(dòng)化光學(xué)檢測(cè)系統(tǒng),廣泛應(yīng)用于工業(yè)生產(chǎn)中的質(zhì)量檢測(cè)環(huán)節(jié)。以下是該系統(tǒng)的功能特點(diǎn)和技術(shù)優(yōu)勢(shì):
 康耐德機(jī)器視覺(jué)AOI系統(tǒng),外觀檢測(cè)新選擇
2025-05-11
康耐德機(jī)器視覺(jué)AOI系統(tǒng),外觀檢測(cè)新選擇
2025-05-11
康耐德機(jī)器視覺(jué)AOI系統(tǒng)在外觀缺陷檢測(cè)方面具備強(qiáng)大的功能,能夠高效、精準(zhǔn)地識(shí)別和分類(lèi)各種外觀缺陷
 康耐德機(jī)器視覺(jué)AOI:多維度尺寸測(cè)量,技術(shù)賦能生產(chǎn)
2025-05-11
康耐德機(jī)器視覺(jué)AOI:多維度尺寸測(cè)量,技術(shù)賦能生產(chǎn)
2025-05-11
康耐德機(jī)器視覺(jué)AOI檢測(cè)系統(tǒng)的尺寸測(cè)量功能具有以下特點(diǎn)和應(yīng)用場(chǎng)景:
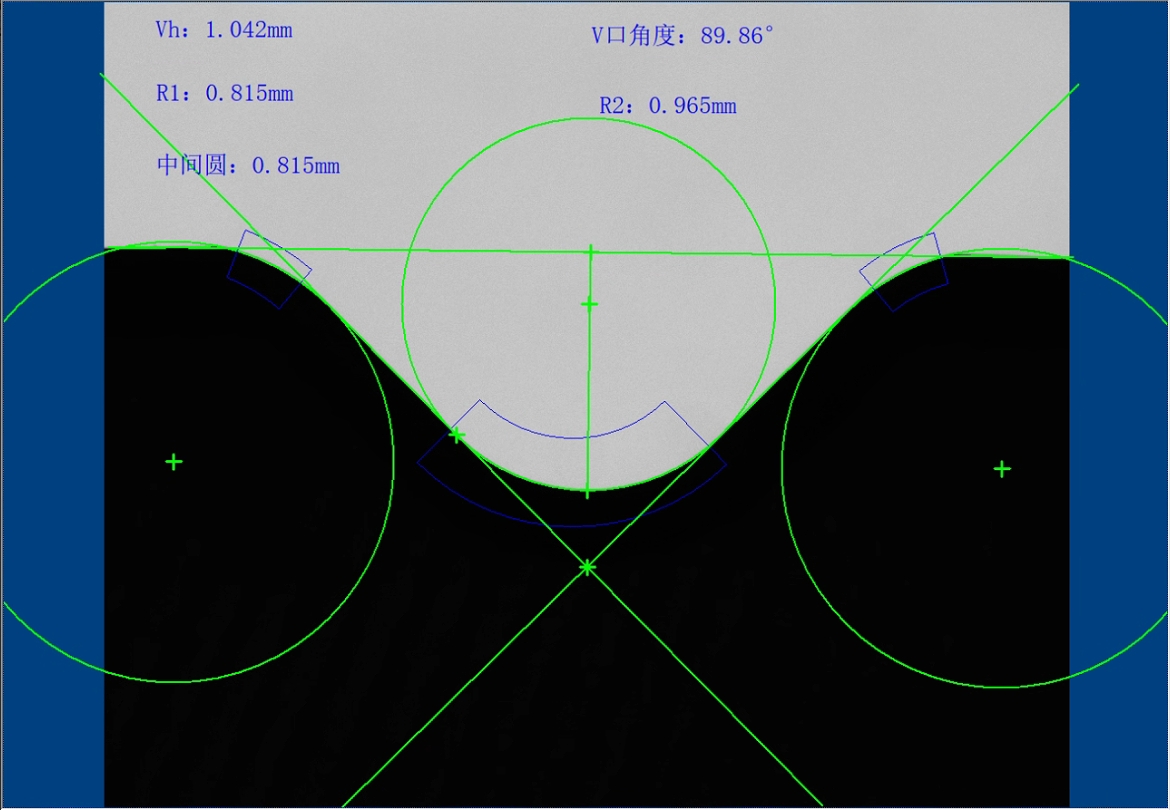 康耐德智能晶圓NOTCH槽口輪廓視覺(jué)檢測(cè)
2025-04-26
康耐德智能晶圓NOTCH槽口輪廓視覺(jué)檢測(cè)
2025-04-26
晶圓NOTCH輪廓檢測(cè)是半導(dǎo)體制造中重要的檢測(cè)環(huán)節(jié),主要測(cè)量晶圓邊緣、槽口(notch)的形狀和尺寸,確保晶圓的質(zhì)量和工藝精度。
 官方公眾號(hào)
官方公眾號(hào) 官方抖音號(hào)
官方抖音號(hào)Copyright ? 2022 東莞康耐德智能控制有限公司版權(quán)所有.機(jī)器視覺(jué)系統(tǒng) 粵ICP備2022020204號(hào)-1 聯(lián)系我們 | 網(wǎng)站地圖
